Tabela de conteúdos
ABM Discussions and Requirements
Anatomy of a Toolkit: A comprehensive compendium of various agent-based modelling toolkits, on the market today
| C. Nikolay, G. Madey, 2007 | Proceedings of Agent2007: Complex interaction and social emergence, 87-97 |
Abstract: With so many toolkits available, the choice of which one is best suited for your project can be overwhelming. Moreover, different communities of users prefer different aspects of a toolkit. This paper is a survey of the toolkits that are available today and how they compare to each other from a multi-stakeholder perspective. Our goal is to provide users the ability to better choose a suitable toolkit based on the features abstracted from various documentation and the first hand experiences of a broad range of communities of users and compiled into an easy to use compendium. In addition, we expand the Agent Based Modeling body of knowledge to include information about a breadth of characteristically and historically diverse platforms.
Evaluation of free Java-libraries for social-scientific agent based simulation
| R. Tobias and C. Hofmann, 2004 | JASSS | html | 38 citations in Scholar |
Abstract: This paper compares four freely available programming libraries for support of social scientific agent based computer simulation: RePast, Swarm, Quicksilver, and VSEit. Our aim is evaluation to determine the simulation framework that is the best suited for theory and data based modeling of social interventions, such as information campaigns. Our first step consisted in an Internet search for programming libraries and the selection of suitable candidates for detailed evaluation on the basis of 'knock out' criteria. Next, we developed a rating system and assessed the selected simulation environments on the basis of the rating criteria. The evaluation was based on official program documentation, statements by developers and users, and the experiences and impressions of the evaluators. The evaluation results showed the RePast environment to be the clear winner. In a further step, the evaluation results were weighted according to effort/time/energy saved by social scientists by using the particular ready-made programming library as compared to doing their own programming. Once again, the weighted results show RePast to win out over the other Java based programming libraries examined.
Very subjective choices of the criteria used, without references in the literature. For example, one of the topics is “easy to use,” that in terms of Human-Machine
Interaction it would require a whole paper.
| Minor Grade | Higher grade | Repast | Swarm | |
|---|---|---|---|---|
| License | code not available | code under LGPL/BSD | 6 | 5 |
| Documentation | incomplete or no documentation | complete with additional functionality provided | 6 | 6 |
| Support | no support | contact to developers and users | 5 | 3 |
| User base | used only by the developer or never | established and recognized in the social scientific community | 5 | 6 |
| Future viability | product outdated and no maintenance | support and maintenance assured for the next ten years | 5 | 5 |
| Support for modeling | only Java | modeling without programming knowledge | 3 | 3 |
| Simulation control | only Java | full control over the simulation | 5 | 5 |
| Experimentation | only Java | Monte Carlo and parameter optimization algorithms | 3 | 3 |
| Project organization | only Java | management of simulation runs, experimental series and versioning | 1 | 1 |
| Ease of use | difficult even with programming skills | graphical user interface | 3 | 2 |
| Communication | everything is source code | model and documentation linked, model executed on the Web | 1 | 1 |
| Ease of installation | could not be installed | easy for lay people | 6 | 4 |
| Number of agents | few and simple agents | no limitations and very efficient algorithms | 6 | 6 |
| Agents communication | must be programmed | complex, ease and rapid data exchange processes | 4 | 4 |
| Nesting of agents | no nesting | unlimited levels of autonomous nested agents | 6 | 6 |
| Agent populations | no procedure for generating populations | agents from imported data, statistics, distributions | 3 | 3 |
| Model structure | no changing of structure during execution | changing of network, new agents, “aging” | 4 | 4 |
| Generating networks | Repast = 4 | Swarm = 2 |
|---|
- No procedure for automatically networking agents implemented
- Elementary networks supported (such as all agents networked with all other agents, random networks)
- Automatic generation of networks based on non-social scientific control information (such as networking of all agents within a certain distance, in the sense of spatial interaction)
- Automatic generation of networks of agents based on social scientific control information (such as network density, centralization, etc.)
- Automatic generation of networks based on characteristics (such as networking agents having similar attitudes) and control information
- Automatic generation of networks based on combinations of characteristics and control information
| Management of spatial arrangements | Repast = 4 | Swarm = 2 |
|---|
- No procedures for managing spatial arrangements implemented
- Simple spatial functionality (agents possess a spatial position, simple movements supported)
- Simple positioning algorithms (such as decreasing density with increasing distance from a certain point)
- Simple areas of influence (for example, all agents at a particular distance from active agents can be determined)
- Complex areas of influence (such as possibility for visual obstacles)
- Complex positioning algorithms (such as optimization of position based on various bits of inexact position information)
At the end of the paper, there is a long list of other tools, and the reasons why they were excluded from the analysis.
Requirements Analysis of Agent-Based Simulation Platforms: State of the Art and New Prospects
| M. B. Marietto, N. David, J. S. Sichman, H. Coelho, 2003 | LNCS | 9 citations in Scholar |
| M. B. Marietto, N. David, J. S. Sichman, H. Coelho, 2002 | Multi-Agent Based Simulation Workshop | 4 citations in Scholar |
Abstract: In this paper we propose a preliminary reference model for the requirements specification of agent-based simulation platforms. We give the following contributions: (i) aid the identification of general principles to develop platforms; (ii) advance the analysis and prospection of technical-operational and high-level requirements; (iii) promote the identification of shared requirements, addressing them to the development of an integrated work. We present our reference model and make a comparative analysis between three well-known platforms, resulting in an unambiguous and schematic characterisation of computational systems for agent-based simulation. In effect, when evaluating the importance of requirements analysis in this field it is quite odd to find very few references in the literature about this topic. This observation becomes even more surprising since one can find a considerable number of platforms (though very heterogeneous) available to the research community.
a requirement is a feature of a system or a description of something the system is capable of doing in order to reach its objectives. […] it aims to detail the structure of a system, establishing its principles of behaviour.
- Manage Scheduling Techniques: support controlled simulations and allow repeatability. libraries with the most usual scheduling techniques, like discrete-time simulation and event-based simulation.
- Launch Agents: agent templates related with different manners to launch agents like threads, applets and objects.
- Manage Intentional Failures: two classes of failures that can be manipulated. operational failures works with disturbances on the technical-operational infrastructure (corrupted messages, server failures, etc.). logical failures manipulate patterns of behaviour that can be viewed as dysfunctional exceptions in the simulated system. The platform should offer: (i) libraries to manipulate basic operational failures; (ii) mechanisms to store and search templates of logical failures created by users.
- Integrate Controlled and Non-Controlled Environments: there are cases where the agents can (or must) perform actions outside the controlled environment, in real environments. a platform should offer agent architectures that separate the agent domain-dependent behaviour from the simulator design patterns. (
 : didn't understand, but it cites another paper of the same author)
: didn't understand, but it cites another paper of the same author) - Develop Agent Architectures: templates of generic agent architectures, from reactive to intentional agents.
- Manage Communication Methods: message passing mechanisms. message models with basic attributes and mechanisms to extend or add additional attributes; APIs and parsers to check the correctness of the communication (eventually according to given standards, e.g. KQML)
- Manage Organisational Abstractions: components that explicitly structure an organisation. Roles and groups are the most common ones. The platform should provide services that define roles in terms of functions, activities or responsibilities. The platform should support the creation and management of agent and organisation collections, clustered around common relations.
- Manage Multiple Societies: a society may be seen as an aggregate of agents and organisations, which coexist and interact. Although the term society is an influential organisational metaphor in MAS, its concept is rarely specified as an explicit structural and relational entity. The platform should provide primitives to instantiate multiple societies.
Requirements related to analysis should specify the means to observe behavioural events and the internal state of AEs (agentified entities) during the simulation.

- Observe Behavioural Events: Behavioural events are events that can be observed by an external observer (e.g., message passing, creation/destruction of agents, data base access). mechanisms to select specific points to observe behavioural events. (1), (2), (3) and (4).
- Observe Cognitive Events: agents' internal architectures. For example, analyse if the effect perceived by the agent who issues behavioural events is in fact objective according to the simulation designer/observer's perspective. mechanisms to control the agents' internal mechanisms, in order to trigger specific observation methods. (5), (6) and (7).
- Manage Data Analysis: huge amount of data. technical indicators and decision support (e.g., graphical and statistical packages) to work in more depth with generated data.
The exploration of different initial conditions, sequences of method invocation, mental states or assignment of variables is thus a crucial issue. These experiments can be facilitated if such conditions are allowed to change during the simulation, in-between simulation steps (the platforms studied in this paper do not have any of these functionalities).
- Intervene on Behavioural Events: select specific points to intervene on behavioural events. The intervention should permit the suppression, modification or creation of behavioural events.
- Intervene on Cognitive Events: mechanisms to intervene on the agents' internal mechanisms, for instance on the agents' beliefs or order of method invocation. This may alter the order of invocation and nature of behavioural events.
- Manage Social Opacity: conditions under which the control of cognitive information transfer between agents in different societies is possible (organisational borders). instantiate different topologies of opaque social spaces in a dynamic way. while the observed agents and societies must be visible to the observer agent, the observer agent and societies must be opaque to the observed agents.
- Provide Models of Cognitive Reflectivity: identification of cognitive structures and internal procedures of agents at run time.
MAS infrastructure definitions, needs, and prospects
| L. Gasser, 2000 | LNCS | 29 citations in Scholar |
Abstract: This paper attempts to articulate the general role of infrastructure for multi-agent systems (MAS), and why infrastructure is a particularly critical issue if we are to increase the visibility and impact of multi-agent systems as a universal technology and solution. Second, it presents my current thinking on the socio-technical content of the needed infrastructure in four different comers of the multi-agent systems world: science, education, application, and use.
The public incentives for widespread attention to and use of analogous technologies such as Web browsers and cell phones appeared only with the development of
- a stable, reliable, accessible infrastructures, and
- a critical mass of “content” (e.g., broadly interesting websites) that compelled potential users.
How will the MAS communities create pedagogical environments and tools that will help develop, transfer, and extend the MAS knowledge and skills to impact widening groups of people? Simply put, there are few if any sharable tools with serious pedagogical aims.
I've divided spheres of MAS activity into four categories, each of which has different infrastructure needs - the communities in each sphere have different views of their own “typical, costly, commonly-accepted community technical problems” and different notions of what are the most “systematic and appropriate” solutions to them. These four categories are MAS science, MAS education, MAS application, and MAS use. The most critical infrastructure needs are not the same across these focus areas. There is a table which compares the requisites for each category.
System Elements
- Components (content and processes): libraries
- Design Methodologies: systematic methods, that increase productivity and integrity of the resulting products
- Experimental Platforms: for developing and testing
- IDEs: for construction, operation and use
- Implementation Frameworks: templates that can be filled in with MAS codes and data
Capabilities
- Data Collection: messages, execution, behaviour, tasks
- Experiment Construction: batch modes for multiple runs, easily specifying and construct large MAS
- Information Exchange: reports, source code
- Intentional Failure: the same as Sichmann
- Representation of MAS Concepts/Data: teams and groups, distributed knowledge and interpretation
- Simulaton: repeatable, realtime control/influence and observation, distributed approaches
- Transfer: unplug atents and attach them to other systems or environments
Attributes (of Elements/Services/Capabilities)
- Illustrativeness: visualize or communicate results meaningfully
- Openness: heterogeneous agents (architecture, resource used, interactivity)
- Packaging: self-contained package
- Progressive Complexity: illustrate important principiles
- Robustness: failure tolerance
- Scalability: number of agents
- Support: party responsible for modifications, upgrades
- Usability: correspondence between skills, knowlegde, context of users and the tool
- Visibility: visualize process, interactions and architectures
Other
- Community
- Open Source Projects
Principles and Concepts of Agent-Based Modelling for Developing Geospatial Simulations
Abstract: The aim of this paper is to outline fundamental concepts and principles of the Agent-Based Modelling (ABM) paradigm, with particular reference to the development of geospatial simulations. The paper begins with a brief definition of modelling, followed by a classification of model types, and a comment regarding a shift (in certain circumstances) towards modelling systems at the individual-level. In particular, automata approaches (e.g. Cellular Automata, CA, and ABM) have been particularly popular, with ABM moving to the fore. A definition of agents and agent-based models is given; identifying their advantages and disadvantages, especially in relation to geospatial modelling. The potential use of agent-based models is discussed, and how-to instructions for developing an agent-based model are provided. Types of simulation / modelling systems available for ABM are defined, supplemented with criteria to consider before choosing a particular system for a modelling endeavour. Information pertaining to a selection of simulation / modelling systems (Swarm, MASON, Repast, StarLogo, NetLogo, OBEUS, AgentSheets and AnyLogic) is provided, categorised by their licensing policy (open source, shareware / freeware and proprietary systems). The evaluation (i.e. verification, calibration, validation and analysis) of agent-based models and their output is examined, and noteworthy applications are discussed. GIS are a particularly useful medium for representing model input and output of a geospatial nature. However, GIS are not well suited to dynamic modelling (e.g. ABM). In particular, problems of representing time and change within GIS are highlighted. Consequently, this paper explores the opportunity of linking (through coupling or integration / embedding) a GIS with a simulation / modelling system purposely built, and therefore better suited to supporting the requirements of ABM. This paper concludes with a synthesis of the discussion that has proceeded.
[…] GIS are not well suited to dynamic modelling (Goodchild, 2005; Maguire, 2005).
Advantages over traditional techniques:
- captures emergent phenomena;
- provides a natural environment for the study of certain systems;
- is flexible, particularly in relation to the development of geospatial models.
There is a description of MAS, its advantages and disadvantages with details.
the agent-based approach to modelling is flexible, particularly in relation to geospatial modelling. […] Agent mobility makes ABM very flexible in terms of potential variables and parameters that can be specified. Neighbourhoods can also be specified using a variety of mechanisms. The implementation of agent interactions can easily be governed by space, networks, or a combination of structures.
[ABM] remains an art more than a science (Axelrod, in press).
By their very definition, agent-based models consider systems at a disaggregated level. This level of detail involves the description of potentially many agent attributes and behaviours, and their interaction with an environment. The only way to treat this type of problem in agent computing is through multiple runs, systematically varying initial conditions or parameters in order to assess the robustness of results (Axtell, 2000).
General requisites for MAS applications are the same as proposed by R. Tobias and C. Hofmann, 2004, only one is new: variety of model environments available (network, raster, and vector);
Open source is particularly useful for verifying a model. it is difficult for a programmer to know whether unexpected outcomes are a reflection of a mistake in the computer programme (a ‘bug’), logical errors of the model, or a surprising consequence of the model itself (Gilbert and Terna, 1999).
Agent-based Simulation Platforms: Review and Development Recommendations
| S. F. Railsback, S. L. Lytinen, S. K. Jackson, 2006 | Simulation | 2 citations in Scholar |
Abstract: Five software platforms for scientific agent-based models (ABMs) were reviewed by implementing example models in each. NetLogo is the highest-level platform, providing a simple yet powerful programming language, built-in graphical interfaces, and comprehensive documentation. It is designed primarily for ABMs of mobile individuals with local interactions in a grid space, but not necessarily clumsy for others. NetLogo is highly recommended, even for prototyping complex models. MASON, Repast, and Swarm are “framework and library” platforms, providing a conceptual framework for organizing and designing ABMs and corresponding software libraries. MASON is least mature and designed with execution speed a high priority. The Objective-C version of Swarm is the most mature library platform and is stable and well organized. Objective-C seems more natural than Java for ABMs but weak error-handling and the lack of developer tools are drawbacks. Java Swarm allows Swarm’s Objective-C libraries to be called from Java; it does not seem to combine the advantages of the two languages well. Repast provides Swarm-like functions in a Java library and is a good choice for many, but parts of its organization and design could be improved. A rough comparison of execution speed found MASON and Repast usually fastest (MASON 1-35% faster than Repast), Swarm (including Objective-C) fastest for simple models but slowest for complex ones, and NetLogo intermediate. Recommendations include completing the documentation (for all platforms except NetLogo), strengthening conceptual frameworks, providing better tools for statistical output and automating simulation experiments, simplifying common tasks, and researching technologies for understanding how simulation results arise.
Our focus is primarily on the “ease of use” issue: how easy is to implement ABMs and conduct experiments on them? There is a table comparing the terminology in five platforms. They have implemented some versions of a stupid model in all five tools.
| Version | Characteristics Added | TerraME |
|---|---|---|
| 1 | 100 agents randomly in a 100×100 grid. one action: move to a random neighbor. locations displayed graphically. | No graphics. Needs replicator |
| 2 | A second bug action: growing by a constant amount. | Yes - Timer priority |
| 3 | Habitat cells that grow food; bug growth is equal to the food they consume from their cell. | Yes - Local automata |
| 4 | “Probes” letting the user see the instance variables of selected cells and bugs. | No graphics |
| 5 | Parameter displays letting the user change the value of key parameters at run time. | No graphics |
| 6 | A histogram of bug sizes. | No graphics |
| 7 | A stopping rule that causes execution to end when any bug reaches a size of 1000. | No |
| 8 | File output of the minimum, mean, and maximum bug sizes each time step. | stat manually. stat over a group? |
| 9 | Randomization of the order in which bugs move. | No |
| 10 | Size-ordering of execution order: bugs move in descending size order. | No |
| 11 | Optimal movement: bugs move to the cell within a radius of 4 that provides highest growth. | Yes - ForEachNeighbour |
| 12 | Mortality and reproduction: constant mortality probability, and reproduce when reach a size of 10. | How to stop an agent? When creating, how to schedule? |
| 13 | A graph of the number of bugs. | No graphics |
| 14 | Initial bug sizes drawn from a random normal distribution. | No |
| 15 | Cell food production rates read from an input file; graphical display of cell food availability. | No graphics. Yes for reading data. |
| 16 | A second “species”: predator agents that hunt bugs. | How to hunt? |
| 17 | Support for simulation experiments | No |
Simulation experiments such as sensitivity and uncertainty analyses require multiple model runs, including (i) “scenarios” varying inputs such as parameter values and (ii) “replicates”, which vary only the pseudo-random number generator seed.
TerraME: How can an agent schedule an action in the future, as we have the definition of time separated from the definition of behaviour?
TerraME: Lua does not have a good random number generator.
TerraME: A problem with lua is that one can't (AFAICS) use agent:function as is, for example as argument to another function, because it is just candy for agent.function(agent), and therefore it is a function call…
Key issues
- The framework and library paradigm is good - but the framework is important: Compared to Swarm, Repast and MASON seem more like libraries and less like frameworks, which makes the transition from ideas to working simulator more difficult. They allow models to be organized in a Swarm-like framework, but their documentation and teaching materials do not emphasize the conceptual aspects of model design.
- Platform complexity is a major concern: this complexity is intimidating
- Lack of a clear philosophy and decision process for what will or will not be included.
- Software not in well-organized packages or libraries.
- Lack of complete documentation. Users should not have to read source code to get a basic idea of how a platform’s methods work.
- Failure to use common design patterns widely. For example, only Swarm’s classes for collections of objects (lists, arrays, maps) are designed so that any class operating on collections (for scheduling, data collection, graphing, etc.) can use any kind of collection.
- IDEs such as Eclipse are very useful
- Scientific modelers need scientific tools: models need scientific analysis (statistics)
- Understanding causality is an unfulfilled need: tools for help understanding what is happening in the model
Some recommendations:
- documentation of classes and methods
- continual development of how-to and template models
- revive the “framework” part of the platform: establish the software library as one part of an overall process leading modelers through the model design, analysis, and publication cycle.
- powerful tools for setting up and executing simulation experiments
- ways to improve the trade-off between ease of use and generality of platforms
- research technologies for testing, analyzing, and understanding ABMs
Platforms and methods for agent-based modeling
| N. Gilbert and S. Bankes, 2002 | National Acad Sciences | 31 citations in Scholar |
Abstract: The range of tools designed to help build agent-based models is briefly reviewed. It is suggested that although progress has been made, there is much further design and development work to be done. Modelers have an important part to play, because the creation of tools and models using those tools proceed in a dialectical relationship.
The authors compare the standardization that occurred in statistical packages to the development of ABM, and the advantages over “rolling your own”, and the limitations of having to know the programming language. They talk a bit about the following tools: repast, swarm, ascape, starlogo, agentsheets, sdml, cormas, desire. The facilities for other phases of a model’s life cycle, model evaluation, model maintenance, and many types of model use are rather limited at this time. The primary supports for model use are visualizations of model state (especially the ubiquitous displays of two-dimensional grids of agent positions) and modest facilities for collecting statistics in a single run. Issues: comparing multiple model runs, loading or calibrating models from data, automatically generating large numbers of cases from experimental designs, collecting and statistically analyzing the results of large numbers of experiments.
The RETSINA MAS Infrastructure
| K. Sycara, M. Paolucci, M. V. Velsen and J. Giampapa, 2003 | Autonomous Agents and Multi-Agent Systems | 154 citations in Scholar |
Abstract: RETSINA is an implemented Multi-Agent System infrastructure that has been developed for several years and applied in many domains ranging from financial portfolio management to logistic planning. In this paper, we distill from our experience in developing MASs to clearly define a generic MAS infrastructure as the domain independent and reusable substratum that supports the agents' social interactions. In addition, we show that the MAS infrastructure imposes requirements on an individual agent if the agent is to be a member of a MAS and take advantage of various components of the MAS infrastructure. Although agents are expected to enter a MAS and seamlessly and effortlessly interac.t with the agents in the MAS infrastructure, the current state of the art demands agents to be programmed with the knowledge of what infrastructure they will utilize, and what are various fall-back and recovery mechanisms that the infrastructure provides. By providing an abstract MAS infrastructure model and a concrete implemented instance of the model, RETSINA, we contribute towards the development of principles and practice to make the MAS infrastructure “invisible” and ubiquitous to the interacting agents.
One element that we articulate is the relation between infrastructure for a single agent and the infrastructure for the MAS in which the agent participates. We consider MAS infrastructure to be the domain independent and reusable substratum on which MAS systems, services, components, live, communicate, interact and interoperate, while the single agent infrastructure is the generic parts of an agent that enable it to be part of a multiagent society.
[The infrastructure is clearly for modelling agents in different machines, but we can use the same concepts for simulating.] Some of the layers presented are (the complete list is here):
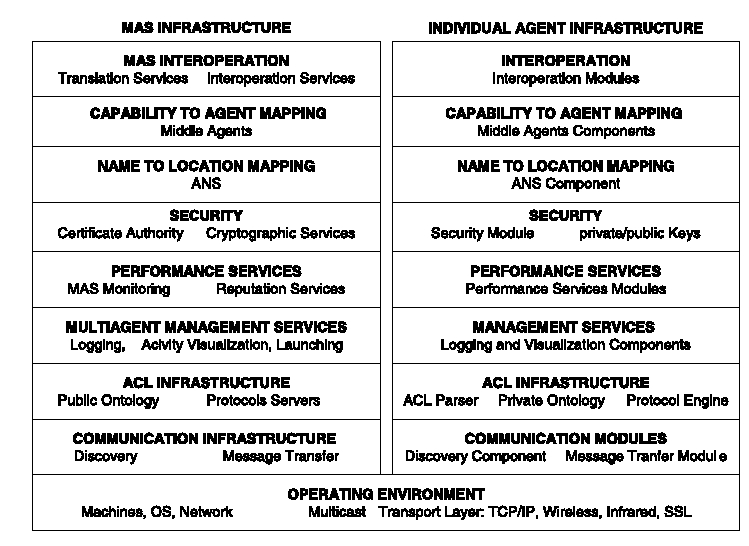{kind=link}
- ACL (Agents Communication Language): it enables agents to be implemented in almost any language
- Mapping names to agent locations
- Performance measurement
- Locating agents by capability
When an agent first comes up in an open environment, it may want to register itself with agent name services. Instead of having hardwired IP addresses for such services, the MAS infrastructure and the corresponding single agent infrastructure can facilitate the discovery of existing registered agents.
TerraME: Instead of having the possibility of finding agents according to the capability, the agents can be located according to a tag, that can store the “class” of the agent. Or perhaps the agent can registry itself using another argument representing this tag.
This information is called the agent’s capability advertisement and is provided by the agent to a middle agent. When an agent needs another that has some required capability, it sends a middle agent a request specifying the desired capability. The middle agent matches requests and advertisements. In general, there could be a variety of middle agents that exhibit different matching behaviors. we have identified 28 middle agent types and have experimented with different performance characteristics.
Discussion: How to locate an middle agent?
Open systems allow agents to enter, and exit, the system dynamically and unpredictably, while closed systems employ a fixed set of agents that are known a priori. In closed MAS each agent knows the name, location and capability of the others. Thus agent interactions can be statically predefined. This makes agent design and construction simple, but makes the MAS brittle and not extensible.
Modelling social action for AI agents
| C. Castelfranchi, 1998 | Applied Artificial Intelligence |
TODO
Computational Laboratories for Spatial Agent-Based Models
| C. Dibble, 2006 | Handbook of Computational Economics |
Abstract: An agent-based model is a virtual world comprising distributed heterogeneous agents who interact over time. In a spatial agent-based model the agents are situated in a spatial environment and are typically assumed to be able to move in various ways across this environment. Some kinds of social or organizational systems may also be modeled as spatial environments, where agents move from one group or department to another and where communications or mobility among groups may be structured according to implicit or explicit channels or transactions costs. This chapter focuses on the potential usefulness of computational laboratories for spatial agent-based modeling. Speaking broadly, a computational laboratory is any computational framework permitting the exploration of the behaviors of complex systems through systematic and replicable simulation experiments. A narrower definition, used here, refers more specifically to specialized software tools to support a wide range of tasks associated with agent-based modeling. These tasks include model development, model evaluation through controlled experimentation, and both the descriptive and normative analysis of model outcomes. This chapter examines how computational laboratory tools and activities facilitate the systematic exploration of spatial agent-based models embodying complex social processes critical for social welfare. Examples include the spatial and temporal coordination of human activities, the diffusion of new ideas or of infectious diseases, and the emergence and ecological dynamics of innovative ideas or of deadly new diseases.
Environments for Multiagent Systems, State-of-the-Art and Research Challenges
| D. Weyns, H. V. D. Parunak, F. Michel, T. Holvoet and J. Ferber, 2005 | Environments for Multi-Agent Systems (LNCS) | 53 citations in Scholar |
(some interesting papers cite this one): “Agents are not part of the problem, agents can solve the problem”, “Environments in multiagent systems”, “Environment as a first class abstraction in multiagent systems”, “Environments for Situated Multi-Agent Systems: Beyond Infrastructure”
Abstract: It is generally accepted that the environment is an essential compound of multiagent systems (MASs). Yet the environment is typically assigned limited responsibilities, or even neglected entirely, overlooking a rich potential for the paradigm of MASs. Opportunities that environments offer, have mostly been researched in the domain of situated MASs. However, the complex principles behind the concepts and responsibilities of the environment and the interplay between agents and environment are not yet fully clarified. In this paper, we first give an overview of the state-of-the-art on environments in MASs. The survey discusses relevant research tracks on environments that have been explored so far. Each track is illustrated with a number of representative contributions by the research community. Based on this study and the results of our own research, we identify a set of core concerns for environments that can be divided in two classes: concerns related to the structure of the environment, and concerns related to the activity in the environment. To conclude, we list a number of research challenges that, in our opinion, are important for further research on environments for MAS.
Exception Handling in Agent Systems
| M Klein, 1999 | Third International Conference on Autonomous Agents |
Semantic Interoperability in Global Information Systems
| A. Ouksel, A. Sheth (Eds.), 1999 | Special Issue of ACM SIGMOD Record |
managing dynamic heterogeneity
Software engineering considerations for individual-based models
| Ropella, G. E. P., S. F. Railsback, and S. K. Jackson. 2002 | Natural Resource Modeling |
understanding causality?